 English
English Deutsch
Deutsch  Italiano
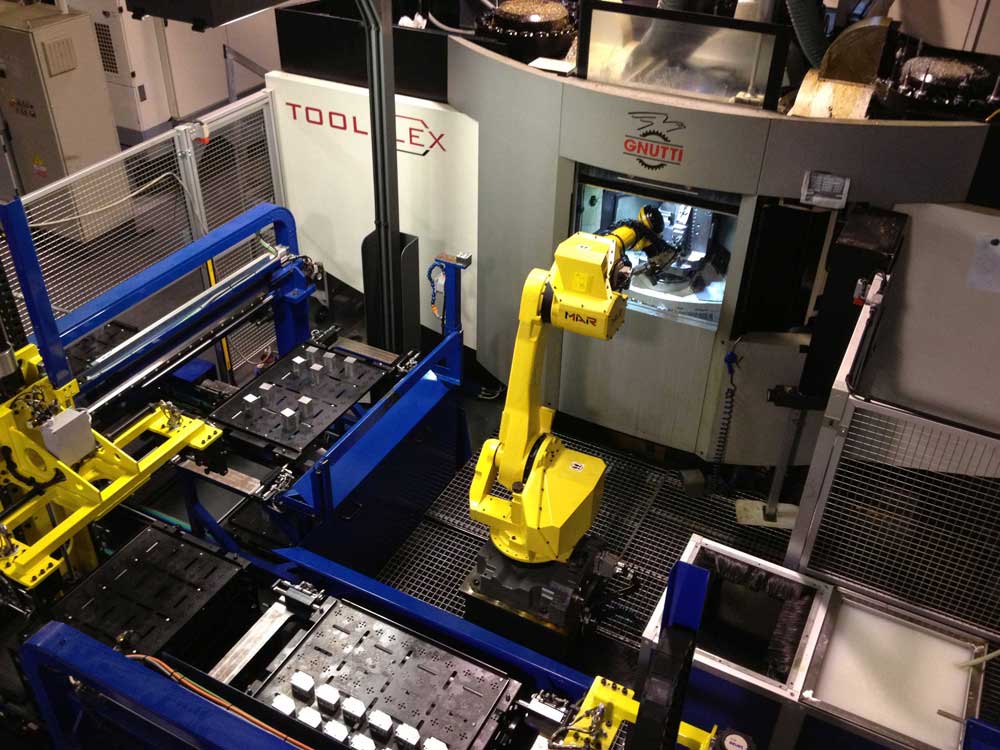
Italiano ROBOTIZED CELL FOR THE CONTROL OF WORK STATIONS
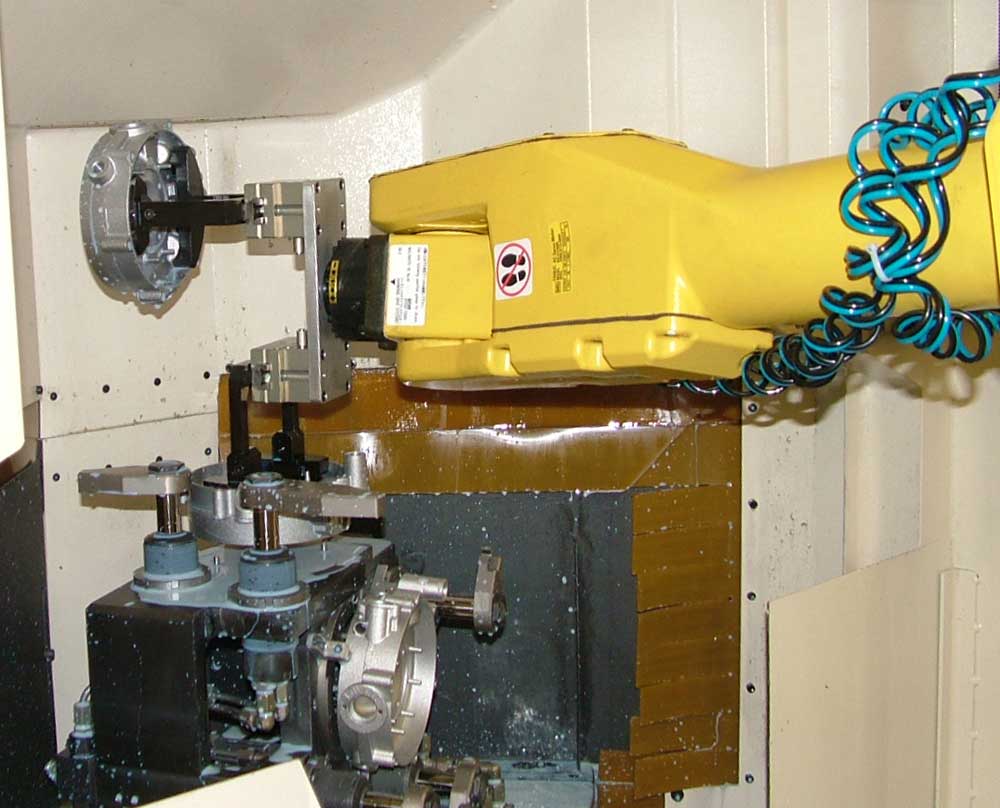
Our robotized system for the automation of Work Stations performs loading, loading/unloading, second-step, and special work cycles with any kind of machine.
Pieces may be loaded with different feeding systems, such as:
– Random feeding system with pieces arts loaded from the containers and unloaded onto a parts sorter; item identification through a vision guided robot. This system allows also for small lots to be processed thanks to its great flexibility and speed in changing items.
– Feeding system on large conveyor belt, used for random manual operator loading, in order to get more system loading autonomy and parts identification by vision guided robot. This system allows the machining of small lots to be processed and the working of very fine details such as items undergoing second-step processing.
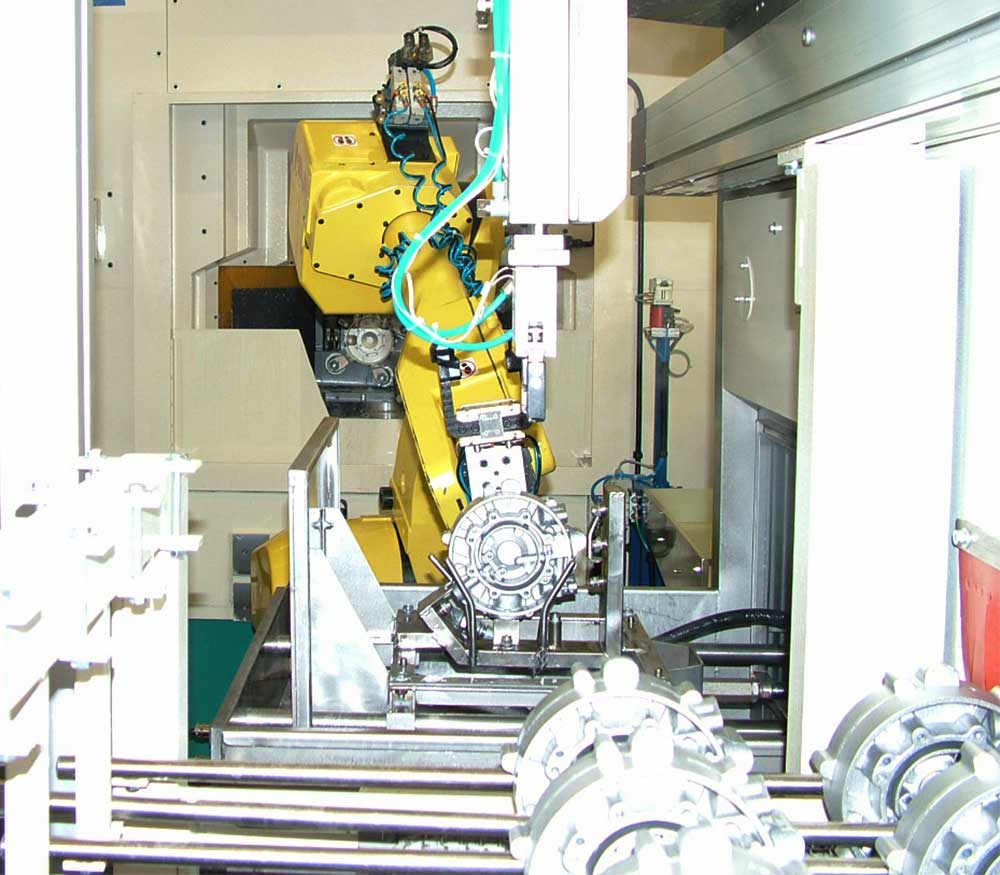
-Palletized feeding system for manual operator loading with established placements. This system is suggested for large lots processing characterized by un-frequent changes.
Processed parts may be unloaded in different ways, such as :
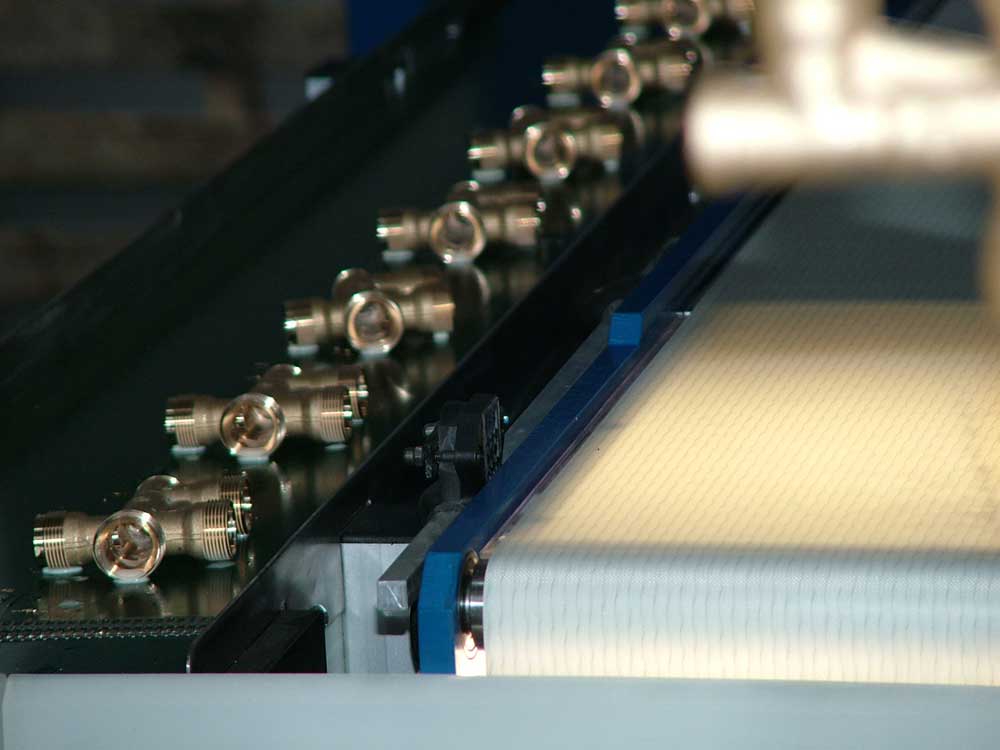
– Unloading performed in an orderly way on conveyor belt used for parts collection.
– Unloading with established placement onto traditional or screw conveyor machines for cleaning parts.
– Unloading onto two-level palletizer in collection containers, where operators use the shelf outside the robotized cell to unload the processed parts in the containers with absolute safety, while the robot responsible for the palletized storage of the processed parts uses the shelf inside the robotized cell.
PRODUCTION
Easy processing of small and second-step lots, speed in changing items.
Work cycle is dependent on the machine tool used for the mechanical processing of the pieces.