 Deutsch
Deutsch English
English  Italiano
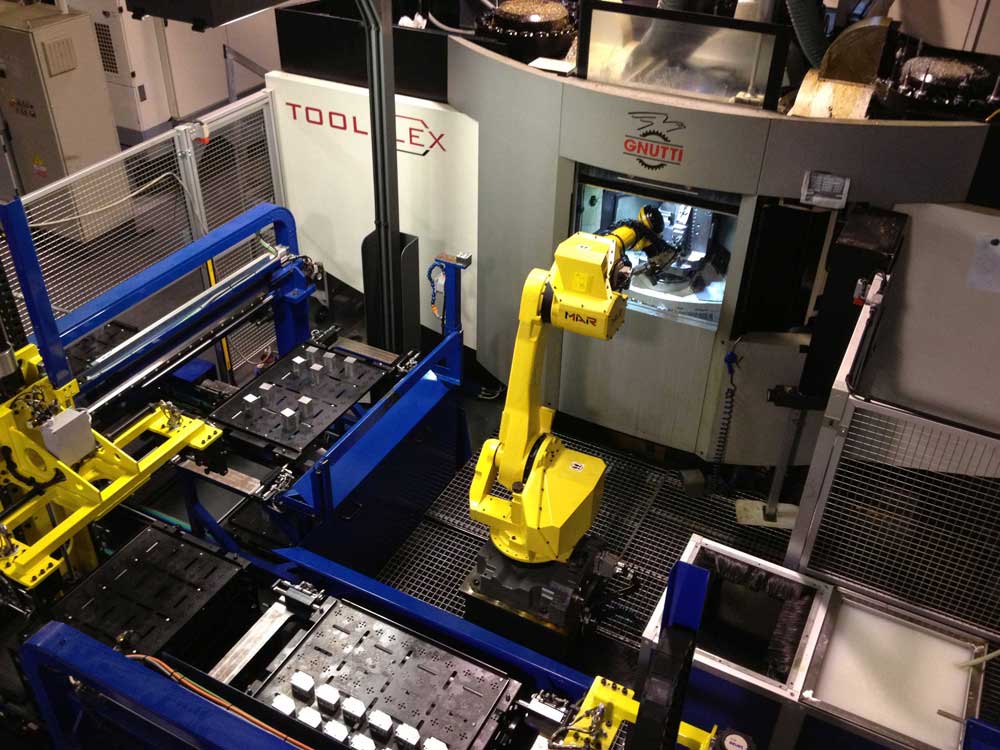
Italiano Robotisiertes system zur Verriegelung an Arbeitszentrum
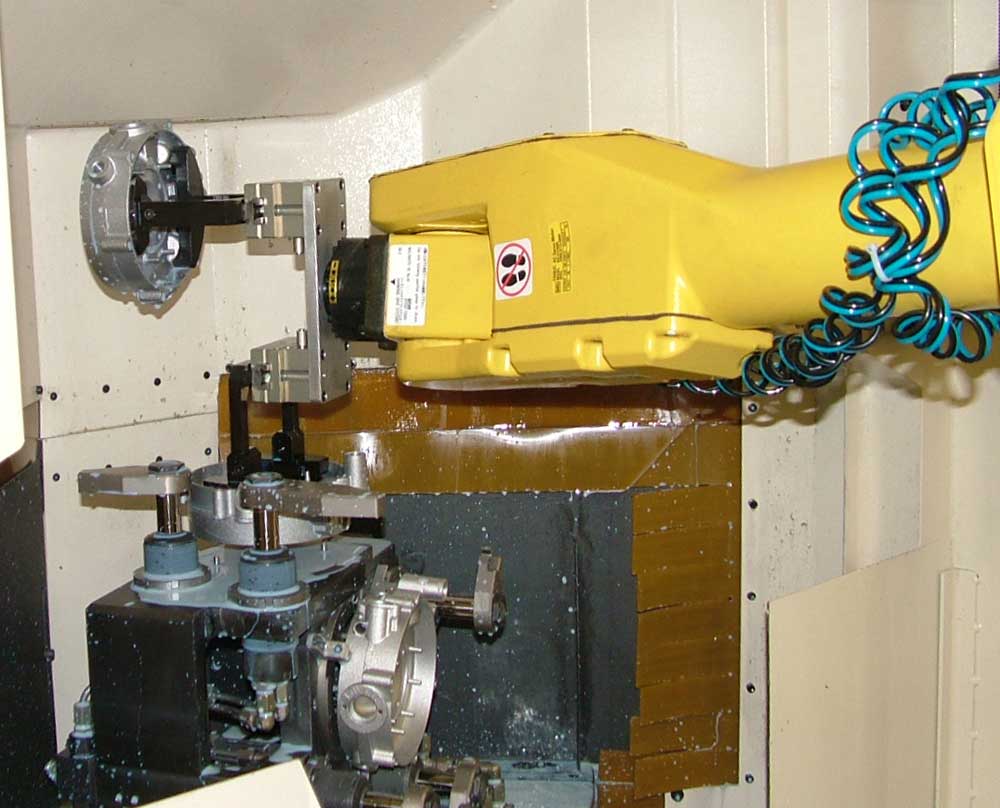
Diese System ermöglicht dem Roboter , Arbeitszyklen der Beladung, Be-und Entladung , Schießen oder irgendwelche speziellen Zyklen auf jeder Art von Maschine durchzuführen .
Die Beladung der Teile erfolgt durch verschiedene Energiequellen , wie z.B:
– System mit Beladung von der Pritsche und Ausladung in den Teilsortierer und Anerkenner durch Robot-Vision System. Dieses System kann auch Kleinlosmengen bearbeiten , danke der grossen Flexibilitaet und Geschwindigkeit des Artikelswechsels.
– System mit manueller Beladung seitens des Bedieners, um eine hoehere Autonomie von Beladung des Systems und die Anerkennung der Teile durch Robot-Vision System zu erreichen. Dieses System kann auch Kleinlosmengen bearbeiten , danke der grossen Flexibilitaet und Geschwindigkeit des Artikelswechsels.
-Palletier-System fuer die manuelle Beladung seitens des Bedieners .
Dieses System wird zur Bearbeitung von Artikeln mit großen Produktionserien geraten
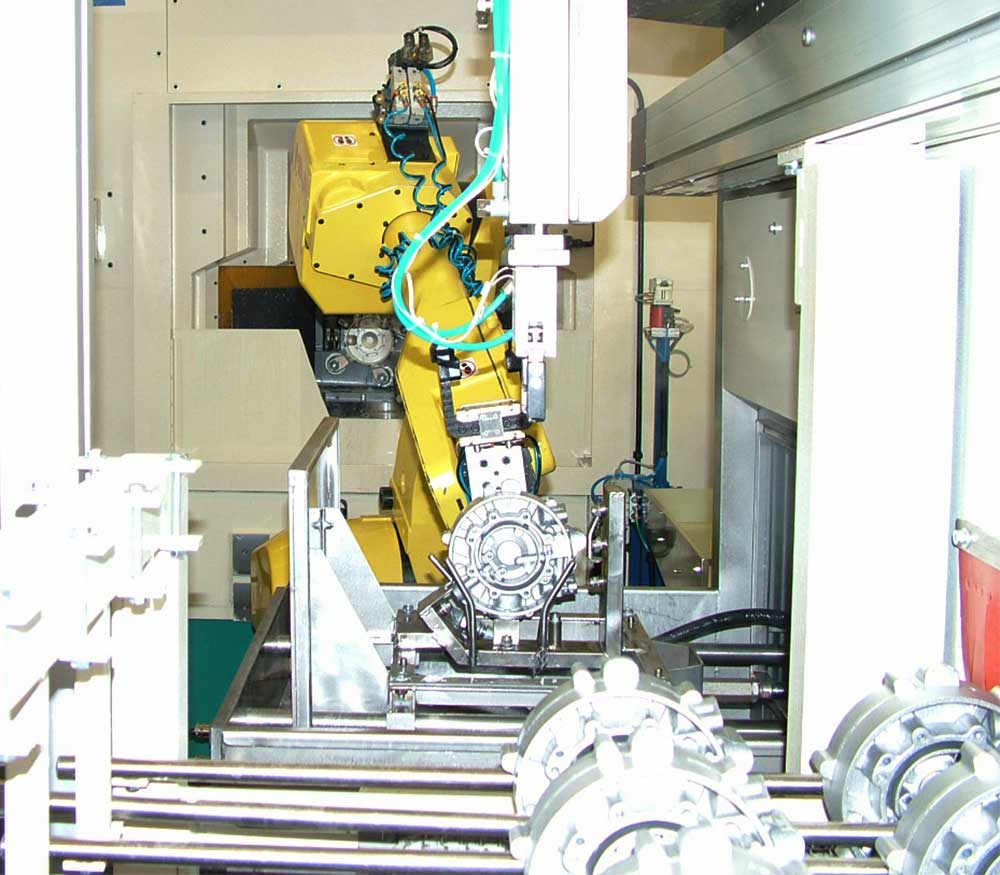
Die Ablagerung der bearbeiteten Werkstücke aus der Maschine , kann unter den verschiedenen Ausladungsarten gekennzeichnet werden :
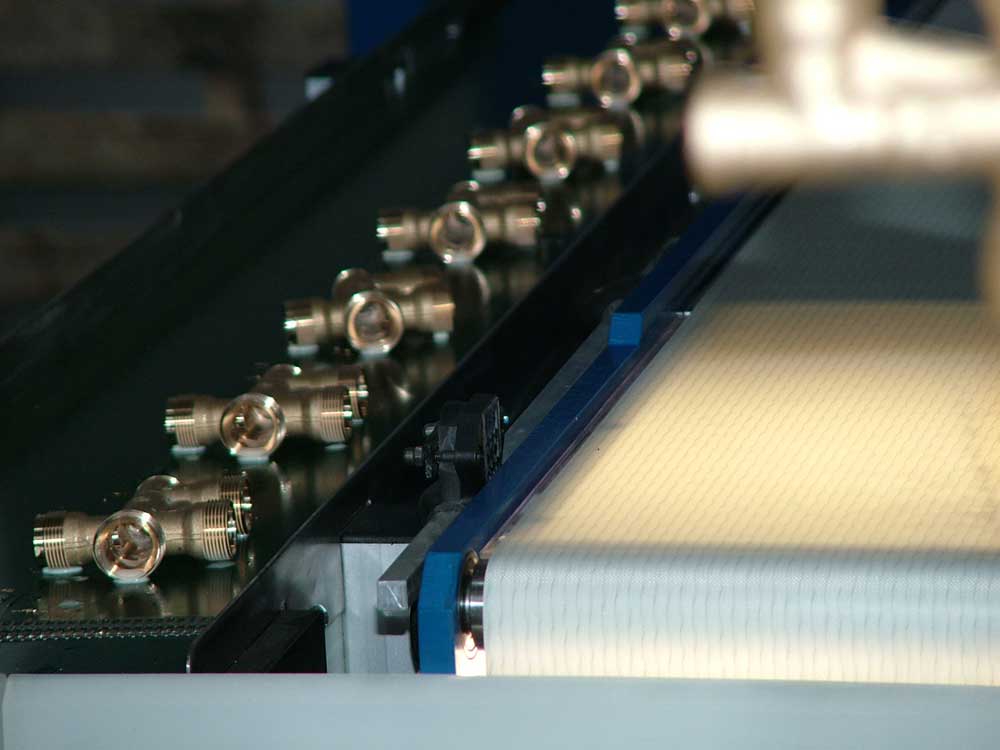
-Ausladung von Fertigteilen in einer ungeordneten Weise
-Ausladung in die Waschmaschine der Teile
-Ausladung auf zweistockigem Palletier, wo das Stock ausser der Insel dem Bediener dienen wird, der die Fertigteile in den Enthaelter entladen wird.
PRODUKTION
Einfache Bearbeitung von Kleinserien , viel Schießen und Geschwindigkeit des Artikelswechsels.